Projects
Tactile-Visuo Search in Cluttered Spaces (Spring 2021)
Course: AA273 State Estimation and Filtering. In this work we look into the problem of reaching into a cupboard-like environment to fetch a spice jar that could be occluded by other objects in the scene. We integrate both vision and tactile measurements in order to create a map of the environment, which can be used to inform where the target object is and also used to create motion plans to execute the task. We use Gaussian Process Implicit Surfaces (GPIS) for integrating these multi-modal measurements into one common representation of the scene.
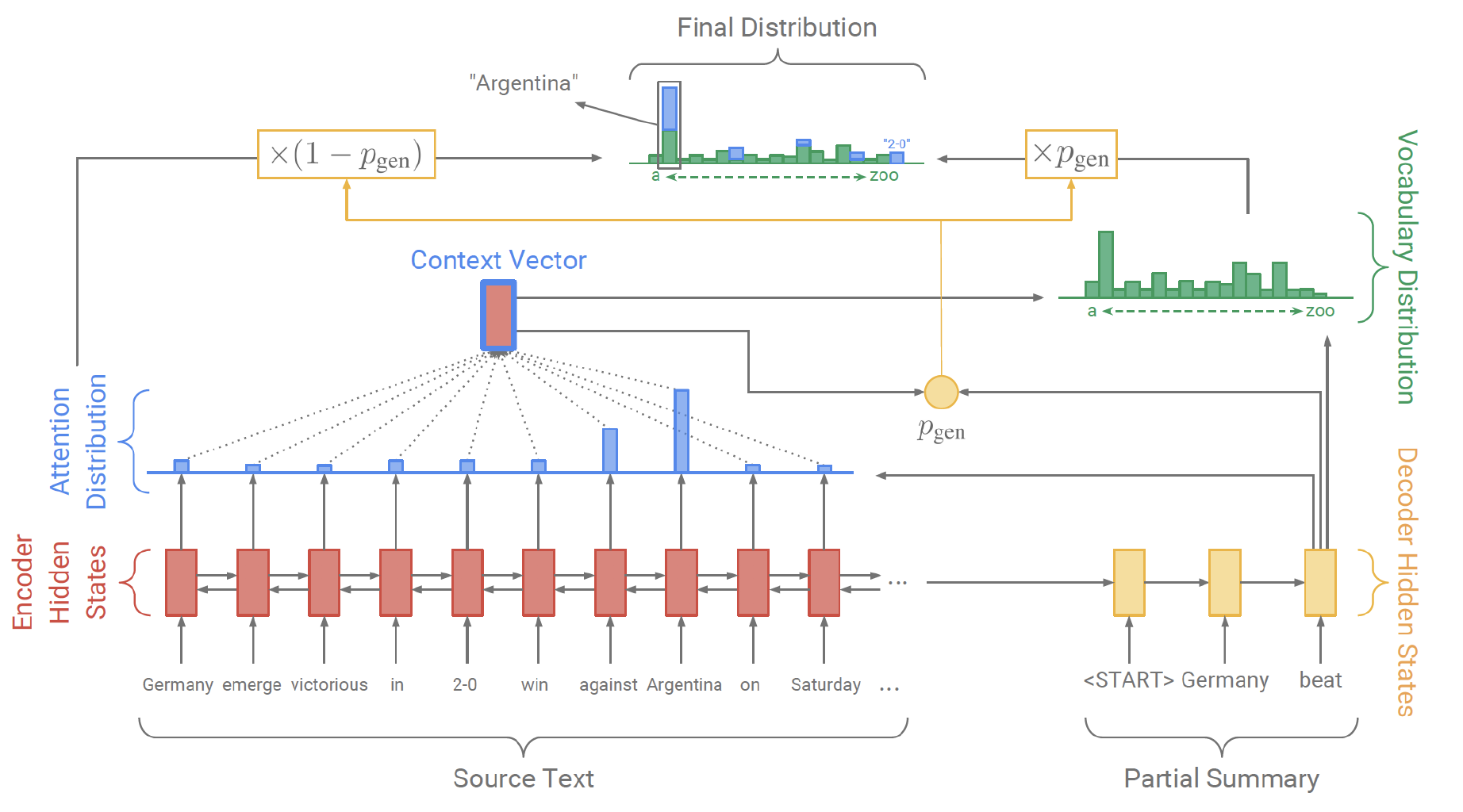
Natural Language Processing: More Abstractive Summarization with Pointer-Generator Networks (Winter 2020)
Course: CS224N Natural Language Processing with Deep Learning. We investigate how to improve on existing neural network approaches to perform abstractive text summarization. One particular challenge is that handling of out-of-vocabulary words, especially with the use of pointer generator networks, causes the network to copy words and sentences from the input excessively resulting in less abstractiveness (i.e. generation of novel text). We formulate a new training method that penalizes on word copying and the resulting model produces significantly more novel n-grams (at least 30% increase) than the baseline model while having comparable performance in terms of ROUGE scores.

Physical Manipulation of Virtual Holograms Using Proxies (Spring 2017)
Course: CS 231A Computer Vision course project. Made a probabilistic Bayesian model to process RGB-D camera frames and find the object most similar to a virtual 3D model. The goal was to use this method in Augmented Reality such that a uesr can find an object in his/her surroundings of similar shape to a hologram and use it as proxy to manipulate the holograms pose.
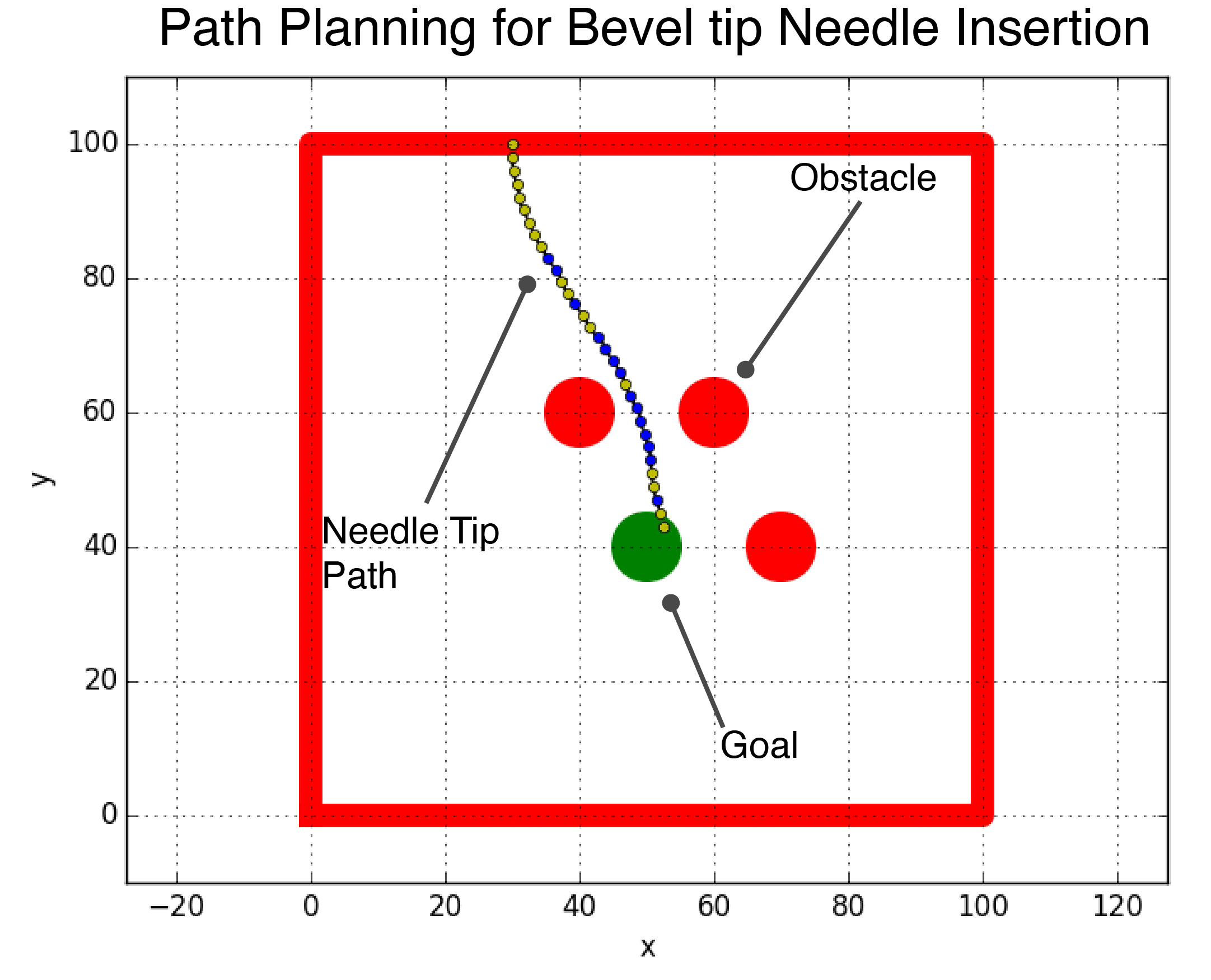
Path Planning for Insertion of a Bevel-Tip Needle (Winter 2016)
Course: CS 238 Decision Making Under Uncertainty course project. Path planning for biopsy needle insertion through unstructured tissue using Partially Observable Monte Carlo Planning (POMCP).
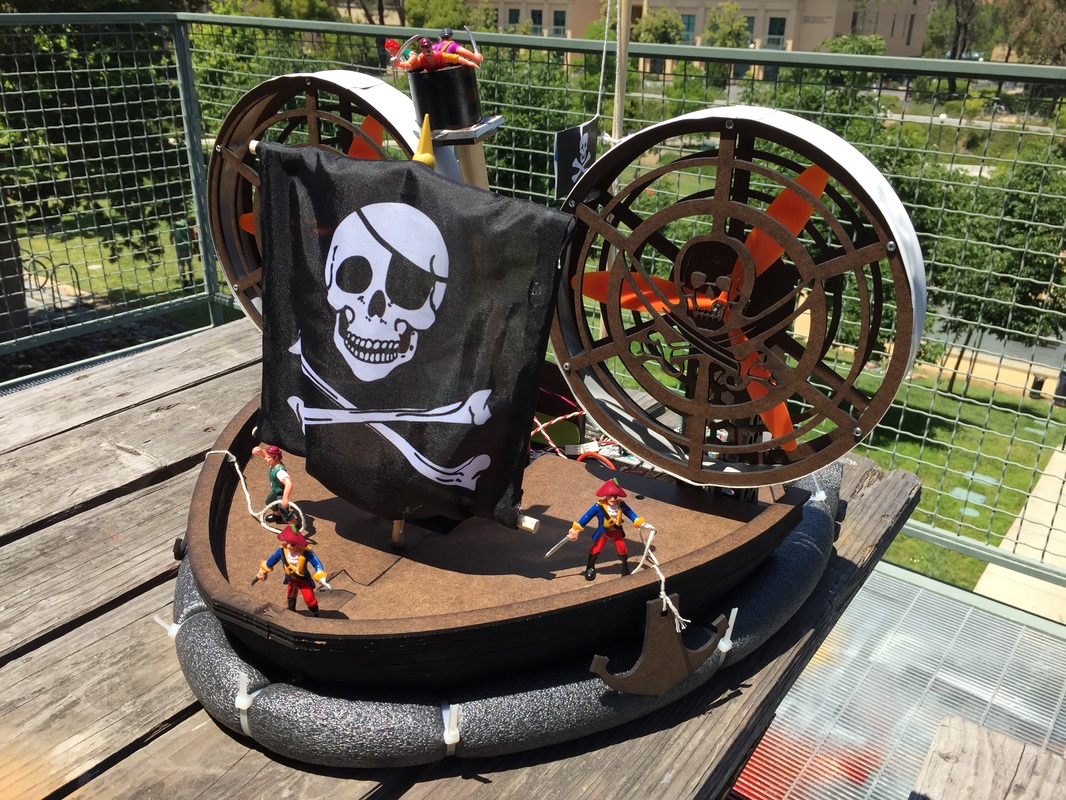
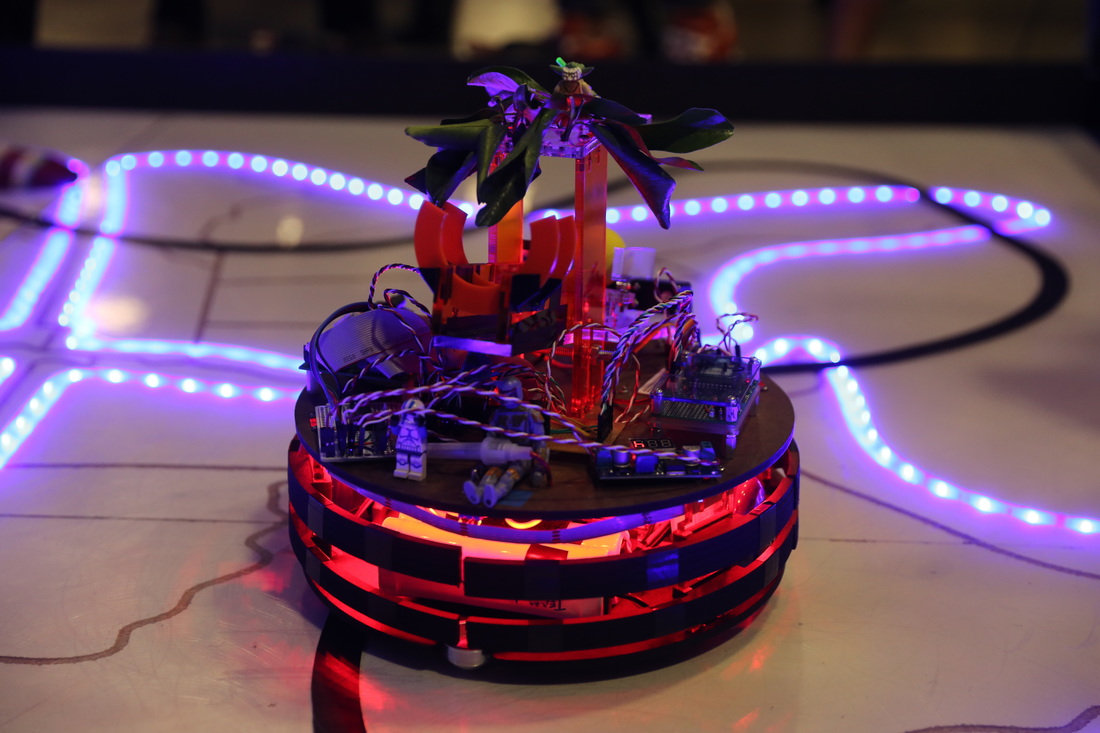
Smart Hovercraft (Spring 2016)
Course: ME 218C Smart Product Design. Designed a remote-controlled hovercraft to compete in the course's final tournament. The goal of the tournament was to drive your hovercraft around collecting ping-pong balls and throwing them into the opponents goal. A bonus of the project was to design the controller such that the player looked silly when sending commands.
Smart Autonomous Car (Winter 2016)
Course: ME 218B Smart Product Design. Designed a smart mobile robot to navigate through a field using electromagnetic sensors and race the opponent in a zone-capture game. Each team's car had to go to map coordinates and send a RF request to capture the zone and had the option to shoot a ball to a bucket to disable the opponent.
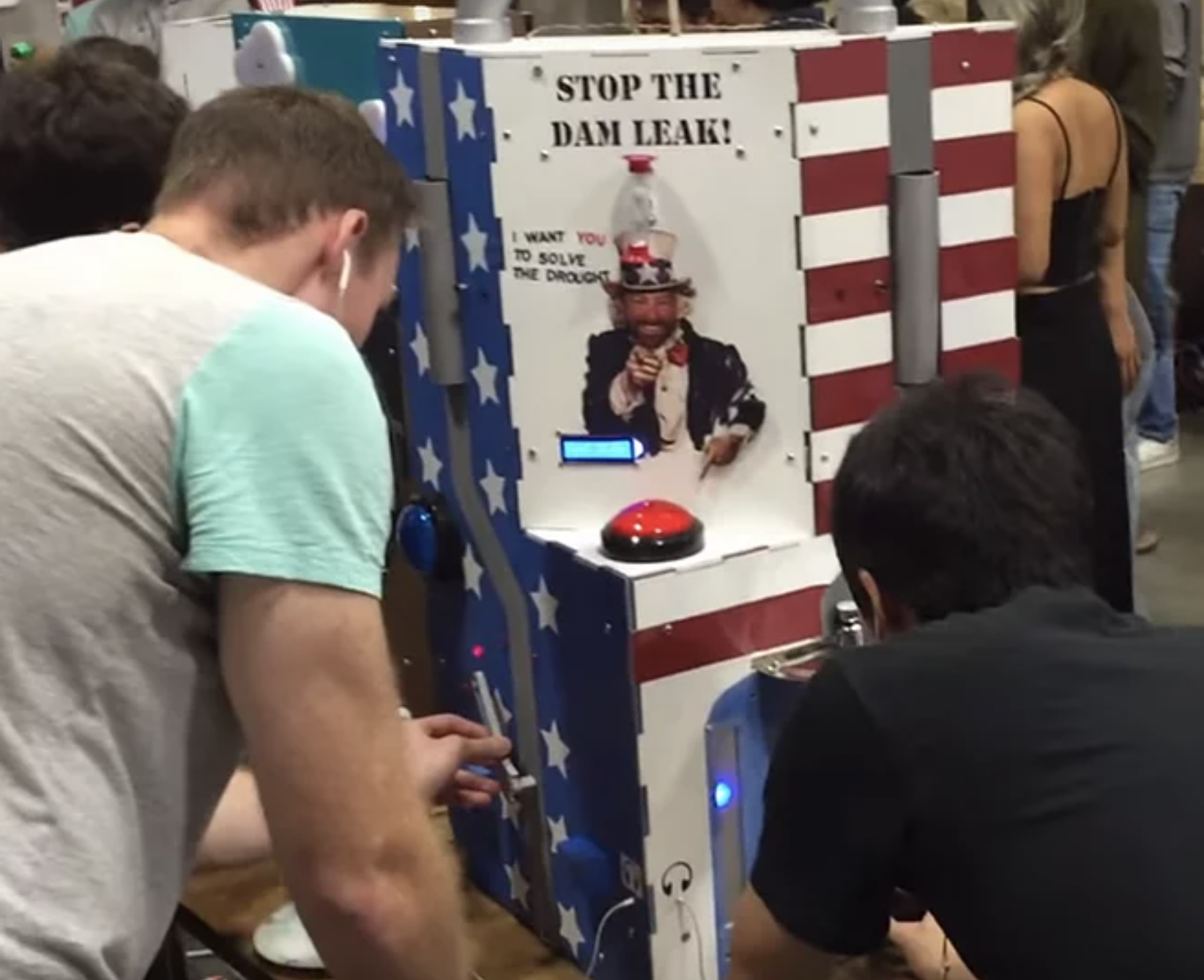
Smart Arcade Game (Fall 2015)
Course: ME 218A Smart Product Design. Designed a two-player arcade game where players interact with different electro-mechanical interfaces and worked together to score points and "stop the leak". One player turned a wrench in a specified pattern and another player moved a bucket to catch the water drops.

TouchMusic (Spring 2015)
Hackathon: LAHacks 2015. The TouchMusic glove is a wearable gadget that enables a music lover to physically experience their favorite songs. The glove does this by decoding a song's rhythm and melody to construct patterns to vibrate into the hand.
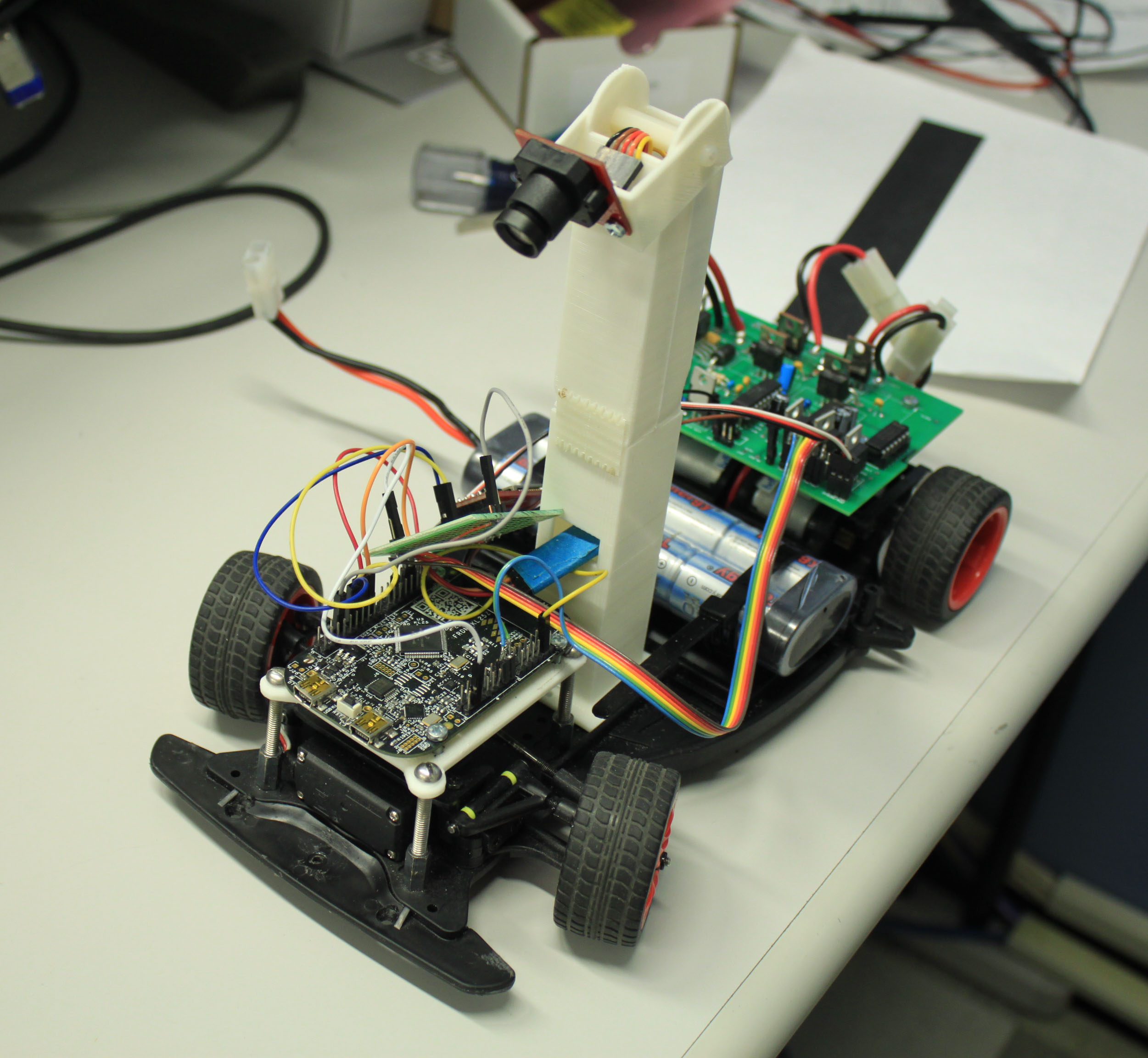
Autonomous Race Car (Spring 2014)
Course: EE192 Mechatronics Design Lab. This course focused on applying concepts such as digital signal processing, controls and circuits into a hands-on team project. The course finished with a course competition followed by the NATCAR race. Throughout the course we built a line-following race RC car using a line-array camera, custom-made motor board and preciously tuned racing control algorithm. My team placed first in the NATCAR competition with an average speed of 9.06 feet/s

Magnetic Levitation and Inverted Pendulum Feedback Control (Fall 2013)
Course: EE128 Feedback Control Systems. This course covered topics such as root locus, Bode and Nyquist plot, Laplace transforms, State-space control and LQR. The labs had fun components such as designing a PID controller for a mini mag-lev system and a non-linear controller to balance an inverted pendulum.